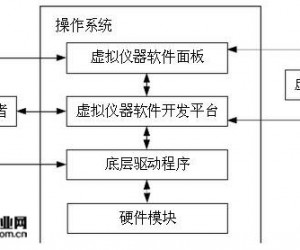
 中泰研创基于LABVIEW的振动信号采集设计
中泰研创基于LABVIEW的振动信号采集设计虚拟仪器是现代实验室的基础。它由计算机、软件和模块式采集设备组成,这些软硬件组合并配置后模拟了传统的硬件仪器的功能。虚拟仪器也称为LABVIEW程序。由于其功能是用户软件定义的,所以虚拟仪器功能非常灵活、强大而又经济。
中泰研创
 中泰研创军用救生弹射座椅加速度测试系统
中泰研创军用救生弹射座椅加速度测试系统弹射座椅是在飞机遇难时依靠座椅下的动力装置将飞行员弹射出机舱,然后张开降落伞使飞行员安全降落的座椅型救生装置。现代作战飞机和一些小型民用飞机大多有弹射座椅。
中泰研创jungong
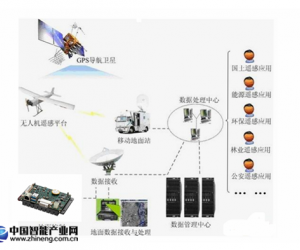 英德斯嵌入式主板PCM-T251在无人机中的应用
英德斯嵌入式主板PCM-T251在无人机中的应用无人机低空航拍摄影技术作为一项空间数据获取的重要手段,具有续航时间长、影像实时传输、高危地区探测、成本低、高分辨率、机动灵活等优点,是卫星遥感与有人机航空遥感的有力补充,在国外已得到广泛应用。而随着我国信息化建设和科学技术的不断进步和发展,无人机的研究发展在总体设计、飞行控制、组合导航、中继数据链路系统、传感器技术、图像传输、信息对抗与反对抗、发射回收、生产制造和实际应用等诸多技术领域都有了长足的进步,达到了实际应用水平。这些致使无人机低空航拍摄影的广泛应用已经成为必然趋势,2009年国家遥感、测绘系统大
英德斯电子uav jungong cehui
 龙腾蓝天航天军工大数据可视化解决方案
龙腾蓝天航天军工大数据可视化解决方案航天军工行业技术含量高、生产周期长,由于其行业的特殊性使得该行业具有很强的垄断性,行业内竞争非常有限,且不受宏观经济调控影响,并且国家安全部门控制的航天企业产品销售基本上以政府采购为主,毛利率较高。
龙腾蓝天jungong
 千牛边防监控无人机解决方案
千牛边防监控无人机解决方案我国共有陆地边界线约22000多公里,分别与14个国家接壤,其中有2/3的边境线是高山大漠。针对我国边境线出入境人流量大,走私偷渡等犯罪活动严重的情况,客观上要求边防部门执行任务的距离远,反应的速度快。传统的边防监控多以人工监控的方式进行、比如站岗、了望、 巡逻等。但由于边防区域地理位置复杂,无人值守边防站现场、出入境口岸现场等边境监控重点区域分布较广,且与监控中心距离较远,造成有线网络利用上的不便,使得传统监控一直未能很好地满足边境监控的需求。无人机技术的快速发展,使边防监控系统科技化、智能化发展成为可
千牛uav jungong
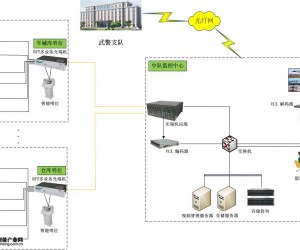 武警视频监控系统
武警视频监控系统中国人民武装警察部队是国家赋予的担任国家安全任务的部队。随着科技信息化的发展,现代化管理的需求越来越迫切。建立一套完整的符合现代化管理的视频监控系统是武警部队科技管理的重中之重。
北京蛙视通信tongxun
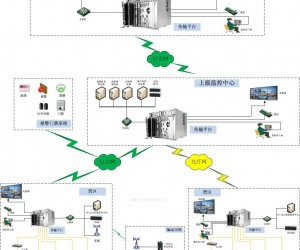 营区视频监控系统
营区视频监控系统随着全球经济水平和科学技术的发展,军队管理的数字化、信息化、智能化、集成化,对不对现代化建设特别是安全性提出了更高的要求,当前各种危害社会安全稳定的手段也层出不穷。为了保障在新技术形势下的国防建设需求,保证不对日常工作的正常运转,采用高科技手段预防、制止犯罪和国防现代化建设已经成为部队安防系统中的共识。
anfang jungong
- 研华船舶自动化与设备控制系统解决方案
江苏某自动化科技有限公司以自动化控制以基础,致力于为船舶电站及输配电系统、船舶机舱自动化系统、船舶主机控制及驾控系统、船舶网络传输系统、船舶安全监控防爆系统、船舶动力定位系统、船舶电力推进系统、船舶变频及控制系统提供整体解决方案。
研华科技chuanbo
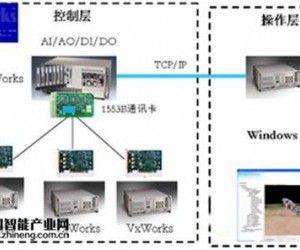 军用实时仿真测试系统应用
军用实时仿真测试系统应用火箭系统测试和结构动力分析是火箭研究的重要课题,建立火箭发射的仿真分析模型需要功能强大和实时的数据采集和控制系统。本系统采用 Vxworks实时操作系统,利用数据采集、数据通讯和三维建模技术,建立包括操作站和控制仿真站的仿真系统。该系统可完成全系统实时单元仿真测试及系统 工作流程仿真测试,支持TCP/IP、1553B、CAN Bus、高速数据传输等功能。
研华科技jungong
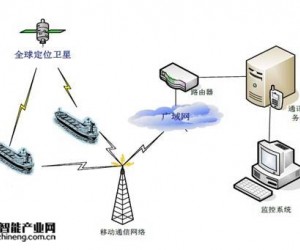 司南RTK定位在大型船舶靠泊的应用
司南RTK定位在大型船舶靠泊的应用随着世界航运经济的不断推进,船舶逐渐向快速化、大型化发展。目前,世界上最大的船舶已达到五、六十万载重吨,尤其是超大型油轮、散货船和大型集装箱船的出现,使安全靠泊成为引航员和船长迫切关心的问题。由于获取船舶实时运动参数的延迟、错误导致船舶操纵失误,从而造成船舶碰撞码头的事情常有发生。司南导航通过M300 GNSS接收机,组建以GNSS组合定位技术的大型船舶靠泊数学模型。在此模型基础之上,建立船基平面坐标系,通过此坐标系计算船舶靠泊时船首、船尾相对码头的距离与速度、船首向与船舶转向率等船舶动态参数。最后,采用
上海司南卫星导航技术股份有限公司chuanbo
- 2026金融展新科技,动码印章颠覆传统金融印控模式
- 2026中国国际金融展:神州鲲泰多元算力筑牢金融数智化底座
- 加速布局个人机器人赛道,启元机器人商业化落地加速
- 阳光电源推出矩阵逆变器,开启新型电力系统新篇章
- 首个智能组件分级标准发布:阳光新能源拿下行业首张高效智能组件证书
- 安世腾宣布完成 5000 万元天使轮融资
- 宇树科技冲刺科创板:全球四足机器人出货量第一,年毛利率超60%
- 宇树科技IPO6月1日上会:2025年扣非净利迅速增长,人形机器人出货量全球第一
- 以光影科技夯实教育数智化底座 爱普生携五大方案亮相第64届高博会
- 秒悟Meoo赋能企业数字化转型:非技术人员也能构建应用,AI全栈开发平台加速产业智能化