一、GNSS驾考/驾培系统背景
近年来,为提高驾照考试质量,确保公平、公正,国家公安部发布了第91号令、第111号令、第123号令以及其它相关技术规范,对驾考系统和标准进提出了改进要求。按照“简单实用,准确可靠”的原则,很多驾考系统集成商基于GNSS产品开发了科目二、科目三等智能考试系统,定位精度可达1cm,在实现精准评判的同时,这套系统也几乎将场地内的各种地埋传感器完全取代,大大降低了后期的场地维护难度和费用,提高了考试或训练场地的建设效率。另外,这套智能考试系统的推广应用将实现机动车驾驶人考试工作由人工操作向计算机管理的转变,提高了了考试工作的透明度,减少了人为因素,体现了公开、公正、公平的原则。
随着GNSS驾考系统的推广应用,驾校培训系统也必须随之升级,以适应驾考需要,事实上,相比较而言,驾培系统的应用更为广泛,市场更大,因此,推出智能驾培系统具有广泛的社会效益和经济效益。
全球卫星定位系统可以实现实时高精度定位,其实时定位精度可达±1cm,实时数据输出频率最大可达20Hz,是目前大范围高精度实时定位的理想选择。GNSS定位系统由GNSS基准站、GNSS移动站、无线数传电台组成,系统具有如下几个优点:
1、全天候作业:不受雨雪、大雾天气及光照条件等因素的影响,可实现全天24小时作业;
2、车载移动站和基准站之间无须通视,大大增加了系统应用的灵活性;
3、车载GNSS设备和基准站使用无线数传电台通讯,覆盖范围可达半径10公里以上,数据传输稳定可靠且保密性好;
4、定位精度及实时性高,定位精度在±1cm,RTK定位输出频率可达10Hz,原始数据可以达到20Hz。
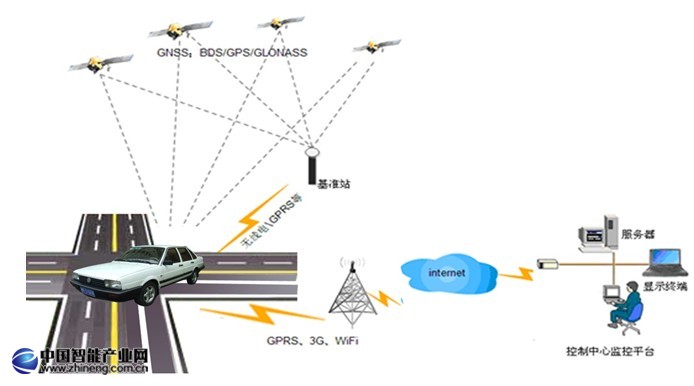
二、方案介绍
整个驾考/驾培系统大体上包括两大部分:硬件部分和软件部分,硬件部分包括GNSS设备、摄像头、无线网桥等各种车载传感器和信号传输设备,负责收集各种数据并传输,软件部分负责处理包括GNSS数据在内的各种传感信息,并分析计算,最终报出评判结果。
GNSS设备可以选择市场上已集成的RTK产品(整机),也可以采用GNSS板卡,两种类型的区别在于:
RTK整机产品:
a)已经做好集成,可直接应用,缩短了开发周期
b)体积已经定型,无法任意修改,不方便进一步集成
c)成本相对较高
GNSS板卡:
a)需要自行设计底板进行集成,开发周期相对较长
b)板卡体积较小,便于与其他设备统一集成
c)成本较低
2.1 科目三GNSS应用方案介绍
科目三、科目二GNSS应用方案中,都包括基准站系统和车载移动站系统两大部分,其中基准站系统是一样的,差别在于车载移动站系统,对于科目三来说,一般采用单天线GNSS设备来实现精确定位,而对于科目二来说,一般采用双天线GNSS设备同时实现精确定位和精确定向。
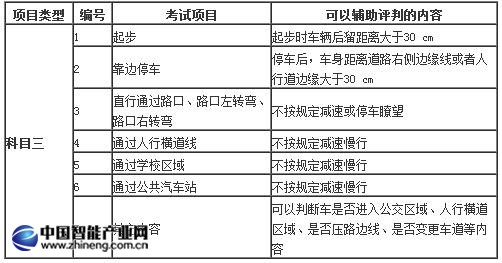
科目三GNSS应用系统可以评判的内容如下表:
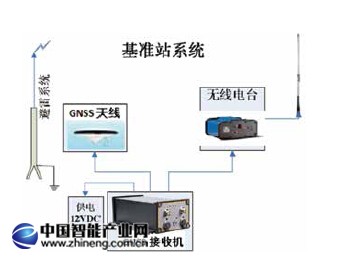
2.1.1 GNSS基准站系统建设
基准站包括GNSS接收机、GNSS天线、无线数传电台、供电设备、避雷设备等。
GNSS差分基准站是整个定位系统的基准框架,长期连续跟踪观测卫星信号,通过数据无线数传电台实时传输播发基准站差分改正信息,并实时为各车载移动站提供高精度的载波相位差分数据及起算坐标。
由于差分信息的播发的连续性和可靠性直接关系到全场的所有车载GNSS设备的GNSS精度,它提供的差分改正数是场内所有车辆定位精度达到厘米级的基础,在基准站位置选择时应做多方面综合考虑。参考站要求建立在地基稳定的地点,同时GNSS基准站场地应满足以下要求:
a)基站的位置一般选择高处、空旷的位置,距易产生多路径效应的地物(如高大建筑、树木、水体、海滩和易积水地带等)的距离不小于200m
b)保证地平线15度以上没有遮挡,建议建设在考试场地范围内的最高处
c)距电磁干扰区(如微波站、无线电发射台、高压线穿越地带等)的距离不小于200m
d)避开易产生振动的地带
e)须保证供电的稳定性,对于电子设备来说,电源不稳定显然会降低其使用寿命甚至可能造成损坏,建议采用UPS设备进行电源保护,防止电源突然中断、电压下陷和电压浪涌
2.1.2 GNSS车载移动站系统
GNSS车载移动站由GNSS接收机、GNSS 天线、无线电接收天线组成。
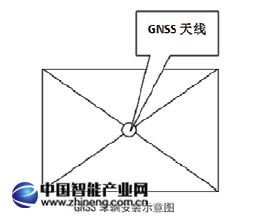
在实际应用时可以将车载移动站GNSS天线固定在车辆顶部,将GNSS接收机主机放在车辆内部,通过数据线和车载电脑连接,GNSS和电脑的通讯方式可以为RS232或RJ45 。

根据GNSS数据进行高精度评判可以通过两种方式实现:
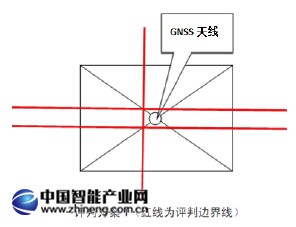
1)在考试路段电子地图上设置GNSS天线所在位置的评判边界线,如果车载GNSS移动站输出的位置越界即判为不合格。
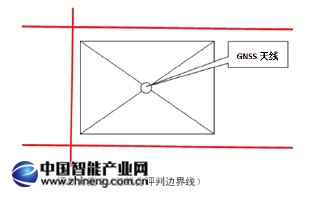
2)通过GNSS天线安装的具体位置及距前后左右的距离,可以反算车辆边缘(或轮胎)的精确位置,在考试路段电子地图上设置车辆边界或轮胎位置的评判边界线,用于考试项目的评判,车辆边缘位置越界即判为不合格。
2.1.3 司南GNSS车载移动站接收机输出数据格式
车载GNSS移动站通过RS-232 或RJ45输出的数据包括用于自动评判的三维位置、方向、速度信息等,可以很方便的利用这些信息进行评判,主要信息包括:
· 考试车辆当前位置的大地坐标(经度L、维度B、高度H);
· 考试车辆当前位置的的平面坐标(北向坐标x,东向坐标y,海拔高度h);
· GNSS定位状态标记(判断定位精度);
· 考试车辆运动速度(判断车辆行驶速度);
· 考试车辆运动方位角(判断车辆方向,方向值不变即为直线行驶)。
2.1.4 GNSS产品推荐
2.1.4.1 司南GNSS板卡
(一)K500板卡
K500 GNSS主板是司南导航公司完全自主研发的全球首款北斗卫星导航系统B1+ GPS L1+ GLonASS L1 三系统单频OEM板卡。K500拥有优越的动态捕获性能及高精度载波相位解算,填补国内外三系统单频系统高动态、高精度单频OEM板卡的市场空白。
K500的硬件尺寸、接口、数据指令与进口主板兼容。
K500可广泛应用于GIS采集器、航空航天、机械控制、系统集成、勘探、精准农业、交通、海洋、港口、气象、国防、科研院所、大专院校等行业的高精度差分定位与授时。
由于是单频定位,K500板卡成本较低,但通过RTD或者RTK等差分方式,其精度也可以达到亚米级甚至厘米级,特别适合于驾考培训系统。
特点:
· 采用北斗B1、GPS L1、GLonASS L1等三系统联合定位或单系统定位,预留伽利略系统;
· 支持SBAS、RTD伪距差分,同时支持单频RTK;
· 支持外接频标,支持PPS输出;
· 兼容进口板卡的物理尺寸、电气接口以及指令报文,可完全替代进口板卡;
· 可直接输出PJK平面坐标,易于各种系统集成及机械控制等;
· 支持定制化服务,可以满足不同行业应用的特殊需求;
· 100M内存数据存储,可自动记录原始数据;
· 高可靠的载波跟踪技术,大大提高了载波精度,为用户提供高质量的原始观测数据;
· 智能动态灵敏度定位技术,适应各种环境的变换,适应更加恶劣、更远距离的定位环境;
· 全面的高精简报文,易于数据传输及配套软件的应用开发;
· 体积小、重量轻、功耗低;
· 独一无二的性价比。
(二)K501板卡
K501 GNSS主板是司南导航完全自主研发的全球首款BD-2(北斗二代卫星导航系统)+GPS小尺寸主板,采用GPS+北斗双系统四频高动态解算引擎,定位可达厘米级定位精度。K501拥有优越的动态捕获性能及高精度载波相位解算,填补了BD-2高动态、高精度应用市场的空白。
K501的硬件尺寸、接口、数据指令与进口主板兼容,与国外某主板(如OEM615),在大小、厚度、定位孔、接插件接口等等完全一致而且在功耗上要优于他们。
K501可广泛应用于高精度驾考定位、测绘(RTK或手持RTK)、变形监测系统、机械控制、系统集成、勘探、精准农业、海洋、港口、气象、国防、科研院所、大专院校等行业的高精度差分定位与授时。
特点:
· 支持BD-2 B1/B2,GPS L1/L2双星四频
· 优于进口板卡的双星解算引擎,真正实现GPS+BD-2的双星解算,适应更加恶劣、更远距离的定位环境
· 支持GPS/BD-2单系统独立定位和GPS+BD-2多系统联合定位
· 兼容进口板卡的物理尺寸、电气接口结合短报文指令,可完全替代进口板卡
· 快速RTK,适合于RTK或手持RTK
· 可直接输出PJK平面坐标,易于各种系统集成及机械控制等,无线第三方进行投影转换开发
· 支持短、中、长基线RTK解算
· 支持定制化服务,可以满足不同行业应用的特殊需求
· 200M内存数据存储,15秒采样可存储1个月数据
· 体积小、重量轻、功耗低
· 高数据更新率,RTK定位数据更新率1Hz\2Hz\5Hz\10Hz可调
· 独一无二的性价比
2.1.4.2 司南M300C GNSS 接收机
司南M300C GNSS接收机采用自主研发的北斗二代+GPS双星主板,浓缩国内外GNSS行业的先进技术,抗干扰能力强、定位速度快、精度高的特点,是国内高精度GNSS测量系统的典范。
M300C接收机主机功耗小于2.5W,由于功耗低产生热量小,解决了密封性与散热的矛盾,降低了接收机的损耗,保证接收机工作的稳定性,延长了接收机使用寿命。数据传输接口采用Lemo头连接,保证了数据通讯的稳定性以及设备接驳的严密性。
M300C是工业级设计的专业接收机,坚固的外型结构和通用的技术性能适合进行长时间连续工作。M300C与AT300测量型天线设备配合使用,能够最大限度地满足驾考系统、机械控制、桥梁健康监测、大坝变形监测、地表沉降变形监测等行业系统集成的需要。
2.1.5 M300C主要特点:
· 采用北斗与GPS双星四频GNSS模块,可单北斗或单GPS定位,也可联合RTK定位,可以在恶劣环境、山区、相对遮挡较严重的地方快速定位
· 高度灵活的分体式接收机、天线设计,适用于各种变形监测、网络参考站、驾考系统、机械控制等系统集成应用
· 内置2000伏光电隔离,对接收机有效进行过流过压保护,预防雷击
· 使用Autobase技术,开机即可快速实现参考站的配置
· 450MHz超高频无线电台适用基准站和流动站作业,确保现场工作的电台信号覆盖范围以及数据安全性,通讯协议支持透明传输、TT450S
· 预留支持以太网、GSM/GPRS通讯
· 支持GPS信号和L2C现代化改造后的GPS信号
· 时间同步支持1PPS实时输出
· 支持PJK平面坐标输出,无需第三方软件做投影转换
· 支持自动差分,差分格式支持RTCM2.X、RTCM3.X以及CMR
· 两个电源接口,两个串口,满足更多需求的使用
· 内部储存为100M,可设置自动记录原始数据
· 可远程设置、下载、查看数据等等
2.2 科目二GNSS应用方案介绍
对于驾校考试系统的科目二,要求测试整个车辆的位置(前后左右移动情况),如果使用GNSS卫星定位系统至少需要两台设备,既要测出车的方位角度又要测出具体位置。
2.2.1 RTK成品推荐——M600姿态定位接收机
司南导航专为驾校系统研发设计出M600 GNSS姿态定位接收机,它采用中国的北斗二代卫星定位系统和美国GPS双星四频GNSS板卡,可以实现在树下、遮挡较严重和高动态情况下能实现快速高精度定位和测向。通过M600 GNSS姿态定位接收机,可以准确无误的判断出车辆整体运动情况,误差在厘米级定位精度。
主要特点
· 采用北斗与GPS双核双星四频GNSS模块,可单北斗或单GPS定位,也可联合RTK定位
· 单套设备可实现高精度RTK定位坐标、方位角和俯仰角或横滚角测量
· 支持PJK平面坐标输出,无需第三方软件做投影转换
· 高动态数据输出,数据更新率支持1Hz、2Hz、5Hz、10Hz
· 可根据客户需求自定义数据输出格式
· 450-470MHz超高频无线电台适用基准站和流动站作业,确保现场工作的电台信号覆盖范围以及数据安全性,通讯协议支持透明传输、TT450S
· 内置2000伏光电隔离,对接收机有效进行过流过压保护,预防雷击
· 内置二极管电源保护功能,可防电源正负极接反
· 预留支持以太网、GSM/GPRS通讯
· 时间同步支持1PPS实时输出
· 支持自动差分,差分格式支持RTCM2.X、RTCM3.X以及CMR
· 两个电源接口,两个串口,满足更多需求的使用
· 内部储存为100M,可设置自动记录原始数据
· 高度灵活的分体式接收机、天线设计,可以应用于各种姿态测量系统
· 姿态测量功能精度优越、性能稳定、功能全面、易于操作,能提供静态或动态平台精确的实时航向、俯仰和横滚姿态角,可以运用在多种运动载体上,如船舶、装卸车辆、港口机械、飞机、雷达等,是海上、空中和地面等姿态测定应用最理想的选择
2.2.2 工作原理
M600 GNSS姿态定位接收机内置两块GNSS板卡,其中一块根据基准站发过来的差分数据进行RTK定位并输出定位坐标,此板卡同时把原始数据发给另一块板卡,另一板卡根据两个板卡的原始数据解算出两个天线位置的方位角和俯仰角或者横滚角,从而输出角度信息。
测姿的原理也是通过差分来实现,就是用两台接收机安置在基线的两端并同步观测相同的卫星,以确定基线两端在地球坐标系中的相对位置或基线向量。它之所以能提高精度,就在于两者的相关性,即通过差分技术来抵消公共误差部分。
差分GNSS的原理如下图原理所示。在已知位置上设置一个参考站,其由一个 GNSS差分接收机和一个差分发射机组成。参考接收机接收卫星信号,监测 GNSS系统的误差,并按规定的时间间隔把修正信息发给另一个接收机,另一个接收机用修正信号校正自己的测量或位置解。
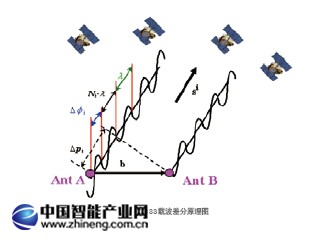
这是参考接收机是固定的情况,而实际应用时更多是都在移动,在这种情况下,参考接收机的位置也是未知的,参考接收机发送给用户的不是差分改正数,而应是全部的伪距或相位,用户接收机得到的也不是改正后的精度更高位置,而是精度较高的相对位置角度。
两个GPS 天线组成一条基线可以确定载体的两个姿态角,两天线沿载体主轴方向配置,此时可以确定载体的偏航角和俯仰角。一般的,两 GPS 天线在安装好后,相对位置不发生变化,所以天线在载体坐标系中的坐标位置是确定的。
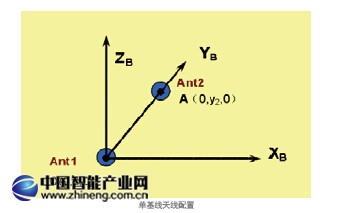
通过求解载波相位整周模糊度,两天线在地心地固坐标系中的相对位置可以精确的求得,根据地心地固坐标系到当地水平坐标系的转换关系,即可将基线矢量转换到当地水平坐标系下,那么基线的两维姿态角就可以确定了。
- 2026金融展新科技,动码印章颠覆传统金融印控模式
- 2026中国国际金融展:神州鲲泰多元算力筑牢金融数智化底座
- 加速布局个人机器人赛道,启元机器人商业化落地加速
- 阳光电源推出矩阵逆变器,开启新型电力系统新篇章
- 首个智能组件分级标准发布:阳光新能源拿下行业首张高效智能组件证书
- 安世腾宣布完成 5000 万元天使轮融资
- 宇树科技冲刺科创板:全球四足机器人出货量第一,年毛利率超60%
- 宇树科技IPO6月1日上会:2025年扣非净利迅速增长,人形机器人出货量全球第一
- 以光影科技夯实教育数智化底座 爱普生携五大方案亮相第64届高博会
- 秒悟Meoo赋能企业数字化转型:非技术人员也能构建应用,AI全栈开发平台加速产业智能化